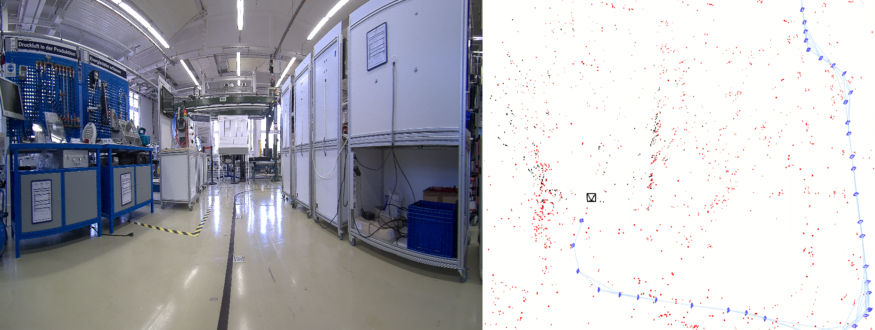
Navigating through unknown surroundings comes relatively easy for most humans. However, it is a highly complex task for autonomous mobile robots and automated guided vehicles (AGV). A sensor needs to simultaneously construct a map of its surroundings and find its location within this map. While this task presents a chicken-and-egg problem (a map is needed for the localization and a location is needed for the mapping), the most reliable solution is called Simultaneous Localization and …
Read more